企业免费推广平台

深圳市嘉明特科技有限公司AGV小车|激光叉车|潜伏顶升AGV|非标AGV小车
134****3100
3.1、使用前检查 为了叉车复合机器人的安全运行及保证复合机器人能够正常启动,开始使用叉车复合机器人前,必须作仔细的检查。 1)急停按钮复位检查 确保叉车复合机器人上的所有急停按钮处于释放的状态 2)激光防撞传感器、机械防撞条、光电传感器检查 检查激光防撞传感器、机械防撞条、光电传感器是否有外观损坏情况,如果有,停止使用,启动叉车麦克纳姆AGV小车(型号规格:JMT-SL2209X),根据语音提示和车载触摸屏排除问题,再投入正常使用。 3)检查叉车复合机器人是否处在启动点(地面上的启动区域内) 确保叉车复合机器人处在启动点,如果不是,启动叉车麦克纳姆AGV小车(型号规格:JMT-SL2209X),切换到手动模式,手动控制叉车复合机器人到启动点上。 3,广东视觉导航复合机器人官网.2、开机操作 1)打开钥匙开关,“OFF”表示断开,“ON”表示接通。 2)拔起急停断电开关。 3)叉车复合机器人自动启动,等待叉车复合机器人发出提示“已启动”,表示启动成功,进入空闲状态,广东视觉导航复合机器人官网,等待调度系统的调度。 3.3、关机操作 1)按下急停断电开关(关闭控制箱中的运动控制器和车体电源,叉车复合机器人无法使用) 关闭钥匙开关(关闭控制箱中的运动控制器和车体电源,叉车复合机器人无法使用)复合机器人生产批发,就选深圳嘉明特,广东视觉导航复合机器人官网,让您满意,有想法可以来我司咨询!广东视觉导航复合机器人官网
2.4、复合机器人信息窗口 点击窗口中的复合机器人信息,弹出复合机器人信息窗口,可以查看和设置复合机器人的基础信息。 —添加:新增加麦克纳姆AGV小车(型号规格:JMT-SL2209X),双击复合机器人的名字可以对复合机器人进行重命名,单击复合机器人的名字,会显示复合机器人的基础信息。 —地址:显示复合机器人的网络IP地址。用于设置软件连接的复合机器人网络,输入IP地址后,点击【设置】并保存工程文件,软件就可以显示复合机器人的基本信息。 其他信息可以忽略,不用操作。 2.5、路线属性窗口 点击窗口中的路线属性,弹出路线属性窗口,在地图窗口中按照路线顺序,将坐标点标记选中后,路线显示在属性窗口中,选中路线后可以编辑和设置复合机器人的路线信息。 属性: —路线类型:可以选择路线的类型(直线、圆弧、直线圆弧混合) —路线长度:显示选中的路线长度 —命令字:动作触发窗口中,编辑的动作名称就是命令字海南磁导航复合机器人应用案例复合机器人生产批发,就选深圳嘉明特,用户的信赖之选,有需求可以来电咨询!

[注 意] 无线网络是整个系统运行的基础,中间调度系统实时检测复合机器人的状态、位置信息、IO盒信号和呼叫器信号。如果无线网络出现延时,复合机器人运行也会出现停止/延时,当断电/无线网络断开时复合机器人无法运行。 2、安装反射板 在复合机器人行驶路线周围一定距离间隔位置布置反射板,复合机器人上的激光传感器发射激光束,同时采集由反射板反射回来的激光束。根据反射回来的多个激光数据可以确定复合机器人在环境中当前的位置和航向。 通过安装反射板可以提高复合机器人的导航精度和稳定性,但是安装反射板需要注意如下事项: ?反射板垂直安装在墙面或者柱子上,避免晃动影响导航 ?反射板的中间位置尽量和复合机器人导航激光头在同一水平线上(同一高度),确保发射的激光束能打在反射板上,如下图 非对称性安装,反射板的安装采用非对称性安装,避免出现定位混乱
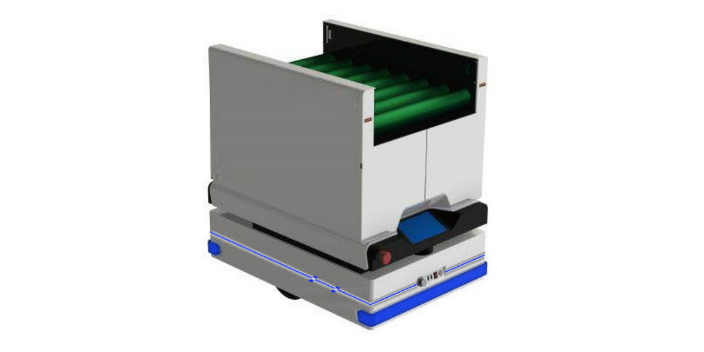
1 手动操纵手柄 复合机器人处于手动模式下,通过操纵手柄控制叉车复合机器人行驶,升降 2 仪表 车体自带的仪表盘 3 后机罩总成 4 激光防撞传感器 在复合机器人运行过程中,用于检测复合机器人运行方向一定范围内的障碍物,并进行声光报警提示,同时复合机器人减速或停止避让,当障碍物移开后复合机器人自动恢复运行(长时间避障停止,需要人工按下释放按钮,才能恢复继续运行) 5 自动充电接口 用于和自动充电桩对接,实现自动充电 6 承载轮 7 货叉 8 车架 9 钥匙开关 控制整车电源的开关 10 急停断电开关 按下,关闭控制箱和车体电源,叉车复合机器人无法被控制 11 蓄电池罩 打开蓄电池罩,可以看到里面的电池。当需要手动充电时,需要打开蓄电池罩,详情查看本手册手动充电操作一节。 12 急停按钮 通过“手按”等简单的操作,即可实现复合机器人紧急停止的功能。紧急停车后,操作人员解决完毕异常状况,释放急停按钮,表示复合机器人的故障已解除,按下复位按钮,复合机器人才能启动继续运行。 13 电源/复位按钮 电源/复位按钮,叉车具备自动充电,充电完成自动开机。所以电源按钮失效,该按钮只有复位按钮功能。复合机器人生产批发,就选深圳嘉明特,有需求可以来电咨询!

?反射板之间的间距至少大于500mm ?跟复合机器人导航激光传感器的距离小于10m的反射板至少需要3个以上,才能起到反射板导航作用,如下图 [注 意] 1、可以通过软件连接上复合机器人后,检查反射板安装是否正确。 2、正常使用叉车复合机器人的过程中,不能移动已经安装好的反射板,否则会影响导航精度;如果移动了,需要重新构建地图。 3、充电系统 自动充电: 叉车复合机器人的自动充电系统采用对接式自动充电。当检测到复合机器人电量不足时,中间调度系统发送充电任务给麦克纳姆AGV小车(型号规格:JMT-SL2209X),复合机器人行驶到达指定位置后,中间调度系统控制充电桩伸出充电接口,对接上复合机器人车体上的充电接口,实现自动充电。 检测到复合机器人电量充满,充电完成,控制充电桩的充电接口缩回,复合机器人可以正常使用。如下示意图:深圳嘉明特为您供应复合机器人,有想法的不要错过哦!广东视觉导航复合机器人官网
复合机器人生产批发,就选深圳嘉明特,用户的信赖之选,有想法的不要错过哦!广东视觉导航复合机器人官网
矩阵点:通过矩阵方式增加坐标点,主要用于有大量矩阵坐标点的场景中 —个数:输入增加坐标点的数量 —新增:地图中鼠标选中的坐标点作为开始点,属性中偏移值作为间距,自动增加坐标点 —插入:地图中鼠标选中的2个坐标点作为开始点和结束点,平均插入坐标点 —是否带有:增加坐标点的过程中,是否带有坐标点的属性。列表中可以选择路线的属性 —origin-new:增加坐标点的过程中,是否带有坐标点的方向。2.8、区域信息窗口 点击窗口中的区域信息,弹出区域信息窗口,可以设置地图中坐标点的区域属性,设置了区域属性的坐标点,在中间调度系统分配路线的时候会参考属性的值进行分配。 —所有区域:显示项目工程中设置的所有区域的名字 —区域节点:显示鼠标选中的区域中所有的坐标点广东视觉导航复合机器人官网
深圳市嘉明特科技有限公司正式组建于2011-05-26,将通过提供以AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车等服务于于一体的组合服务。业务涵盖了AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车等诸多领域,尤其AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车中具有强劲优势,完成了一大批具特色和时代特征的机械及行业设备项目;同时在设计原创、科技创新、标准规范等方面推动行业发展。同时,企业针对用户,在AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车等几大领域,提供更多、更丰富的机械及行业设备产品,进一步为全国更多单位和企业提供更具针对性的机械及行业设备服务。公司坐落于深圳市宝安区石岩街道松白路宏高工业园1栋5楼A区-2,业务覆盖于全国多个省市和地区。持续多年业务创收,进一步为当地经济、社会协调发展做出了贡献。
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
深圳市嘉明特科技有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.

